宁波材料所在水下双模态感知驱动器及其自主反馈系统方面取得进展
自然界中的软体生物对其颜色、对比度以及形状有着惊人的自主控制能力。它们通过动态的身体图案及生物发光实现同类之间的信息交流、伪装、保护和预警,以适应复杂多变的自然环境。一个典型的例子是警报水母,当其感知到海洋猎食者袭击并受伤时,会发出耀眼的光芒以吸引更大的猎食者来消灭眼前的侵略者。这种兼具有感知、识别、自适应和保护的水下环境交互能力有助于探索水下神秘环境及新物种,从而为水下活动的开展提供丰富且必要的信息。
在现有的人工系统中,颜色响应的软致动器、电子皮肤和气动/液压驱动的环境交互系统(如防伪和视觉通信)等新兴的仿生设计模仿了类似生物的感觉或运动行为,旨在丰富某些机器的功能,如软体机器人或假肢。然而,能够将颜色、感觉和自主变形特征集成至一个系统中的软执行器鲜少报导。特别是当它们暴露在恶劣的水下环境中时,高压、水润湿性以及流体波动等因素会严重威胁其导电性、稳定性和可控变形能力。因此,为了实现水环境下的综合功能,需要设计特定的结构和新的工作机制,从而满足水下环境探索与交互的需求。
近期,中国科学院宁波材料技术与工程研究所海洋关键材料重点实验室智能高分子材料团队陈涛研究员和肖鹏研究员基于在碳基/高分子复合薄膜的构筑及其柔性传感器方面的研究基础,受警报水母的启发,开发了一种集水下视觉、感知及自主驱动的仿生水母机器人,实现了对水下刺激的动态感知与荧光预警。
当警报水母受到外界刺激时,它们会自发地通过荧光蛋白和钙离子的结合发出明亮的光,以实现自我保护和水下通信 (图1a)。受此启发,研究团队制备了一种功能和结构集成的荧光皮肤,可以实现刺激感知、自主水下3D变形和荧光展示(图1b)。仿生荧光皮肤由碳纳米管网络与荧光掺杂的硅基弹性体在水/空气界面非对称原位复合而成,并以悬浮式结构集成至仿生水母机器人中(图1c)。在水压诱导的三维变形下,碳纳米管网络发生均匀应变,底层的荧光分子暴露。通过应变相关的微裂纹效应可实现动态电信号和可逆机械显色。此外,设计了基于仿生水母机器人的闭环控制系统,它能主动感知外部正常甚至危险的刺激,并通过自主的3D变形和实时的荧光预警实现自我保护与水下通讯,在水下视觉环境交互系统中显示出巨大的潜力(图1d)。
该工作近期以题为“Jellyfish-Inspired Visual and Sensory Bubbling Robots with Automatic 3D Morphable Films for Underwater Environmental Interaction”的论文发表在ACS Nano上(ACS Nano, 2024, https://doi.org/10.1021/acsnano.4c06714)。本研究得到了国家重点研发计划(2022YFC2805200)、国家自然科学基金(52373094、52073295)、中国科学院青年创新促进会(2023313)、中德合作国际交流项目(M-0424)、宁波市重大研发计划项目(20241ZDYF020148)和宁波国际合作项目(2023H019)等项目的资助。
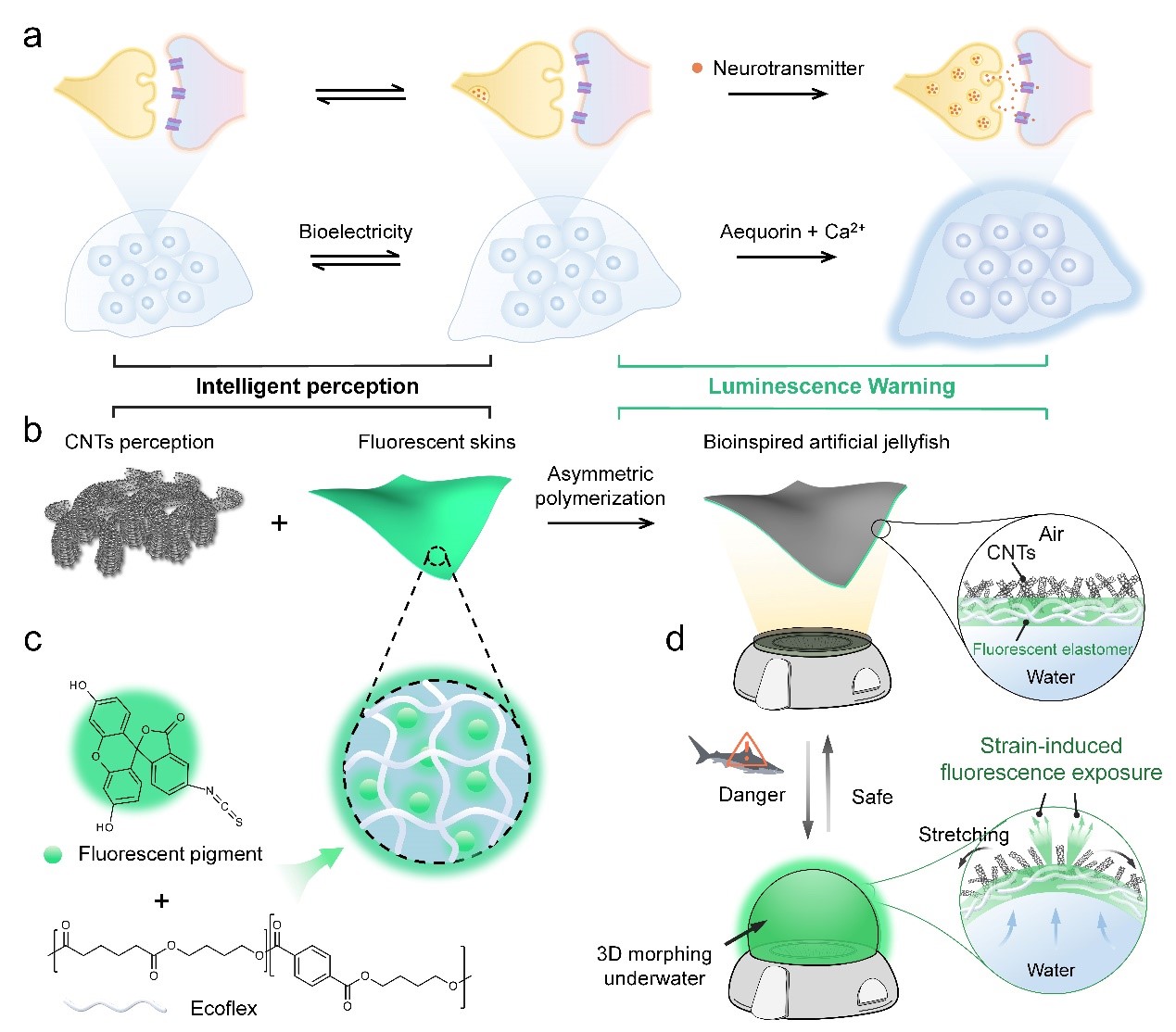
图1 具有水下感知、自主3D形变及荧光预警的仿生水母机器人
(海洋关键材料重点实验室 黎姗、肖鹏)