宁波材料所在钢结构环境高空作业机器人研发方面取得进展
由于钢结构建筑、风电塔、化工储罐等高空作业场景对安全性和作业效率的要求逐年升高,传统人工作业模式已无法满足钢结构作业要求,同时还大大限制了高空作业的高效性和精准性。随着工业自动化和智能化的不断发展,高空作业机器人通过AI驱动和多传感器融合技术,为钢结构的高空作业提供了更为可靠和高效的解决方案。
中国科学院宁波材料技术与工程研究所计算机视觉团队长期致力于高空作业机器人的研究工作,围绕钢结构下高空作业机器人的负载力、自主导航、高效避障等方面取得了多项成果。研发了最大负载50Kg高空作业机器人,可实现最小1000mm 直径的立柱爬行以及0-10m/min范围内的移动速度调节。高空作业机器人搭载了多传感器融合系统与AI智能避障算法,以实现复杂曲面结构的曲率变化自适应、高效避障与自主导航。同时,高空作业机器人还配备了高能超声波团队研发的超声波冲击处理设备,能有效改善风电塔、化工储罐等结构表面的应力分布,提升罐体表面的力学性能和抗损能力。
12月19日,钢结构高空作业机器人亮相第二届特种机器人产业链揭榜总结活动,凭借其先进的AI算法和多传感器融合技术,其展现出了卓越的环境自适应能力和高效的高空作业性能,吸引了业内专家、企业代表及研究人员的密切关注,得到深圳市领导的高度评价。
上述工作得到了宁波市“科创甬江2035”关键技术突破计划(2024Z170)、象山县科技项目(212212016)等项目的资助。
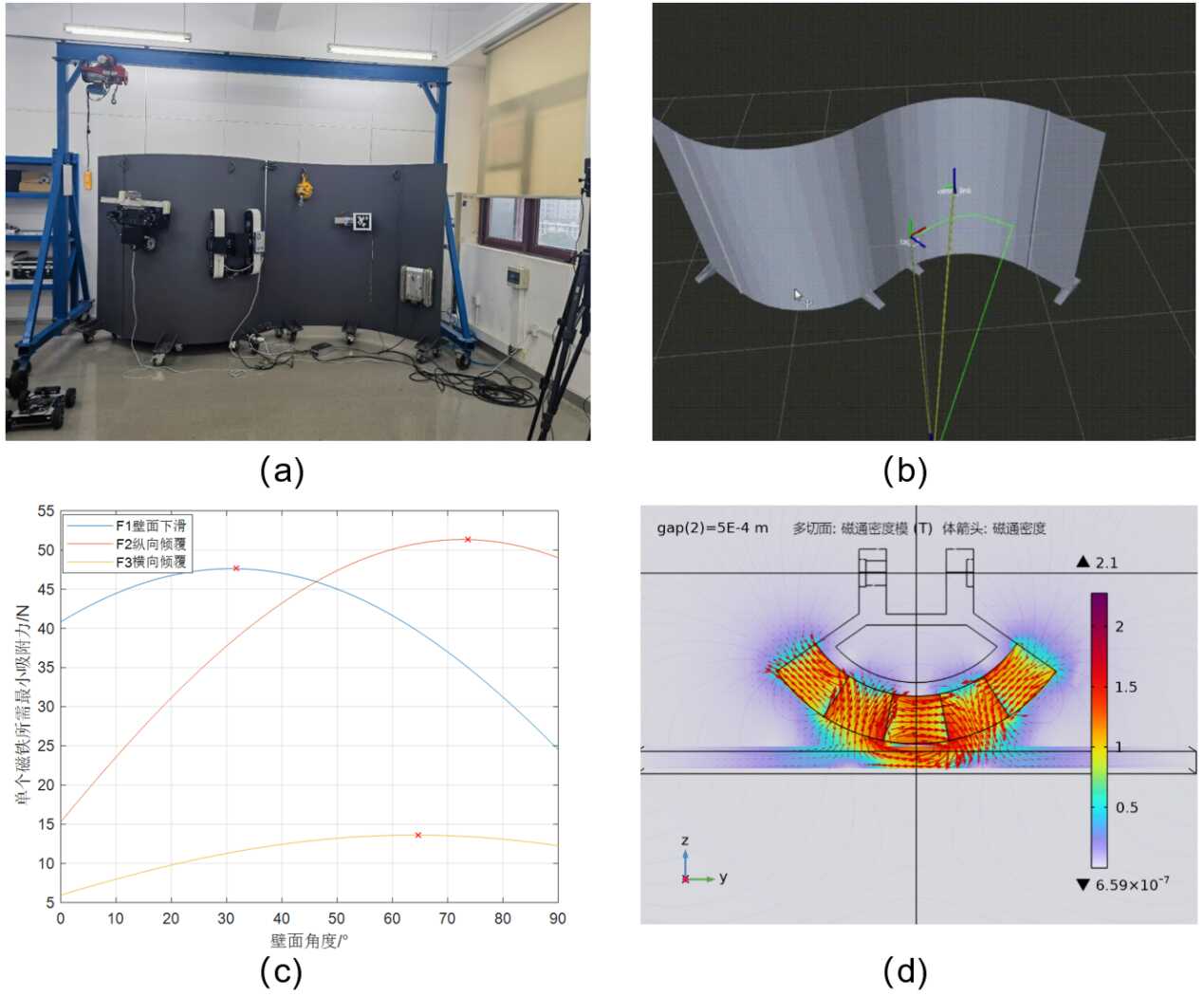
图1 (a) 团队研制多款高空作业机器人演示 ,(b)空间定位仿真示意图,(c)临界条件下吸附力随壁面角度变化关系,(d)吸附力大小与壁面间隙关系仿真分析

图2 钢结构高空作业机器人亮相第二届特种机器人产业链揭榜总结活动
(机器人与智能制造装备技术实验室 茹浩磊)